About
We present THÖR: a dataset of motion trajectories with diverse and accurate social human motion data in a shared indoor environment
Overview
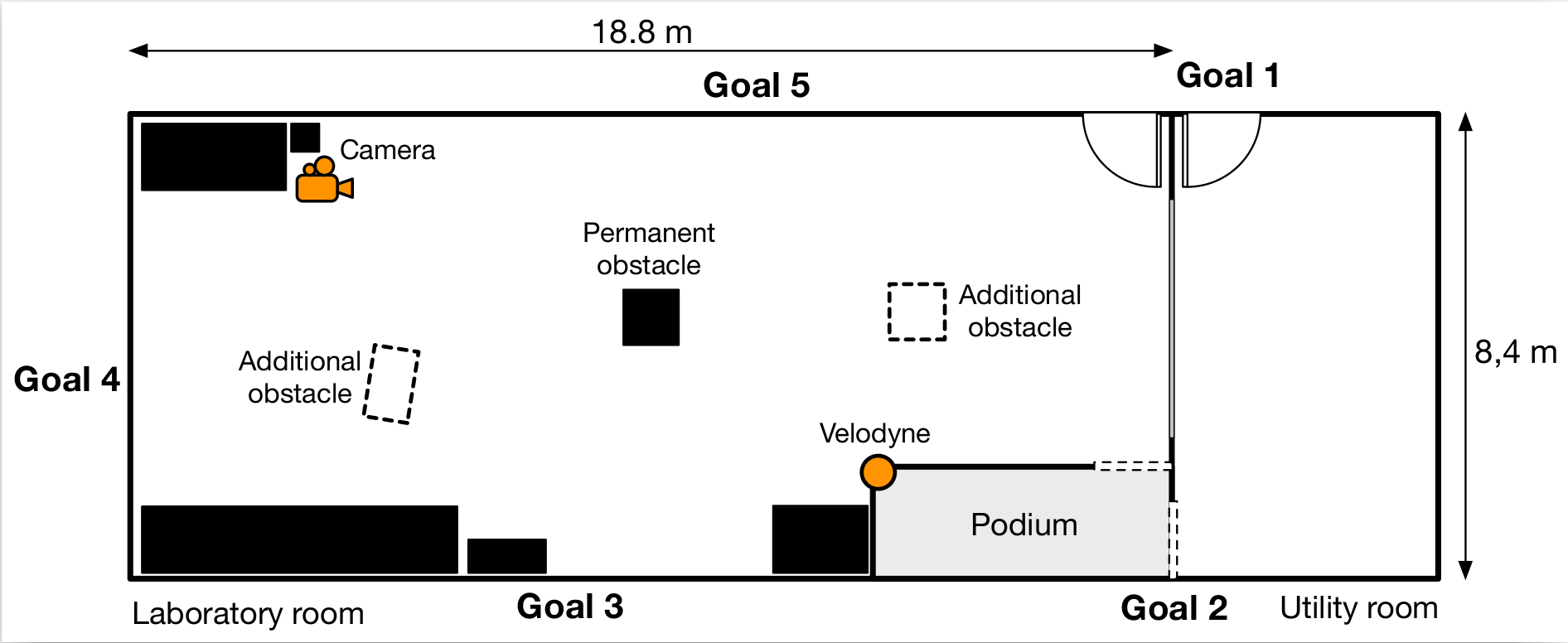
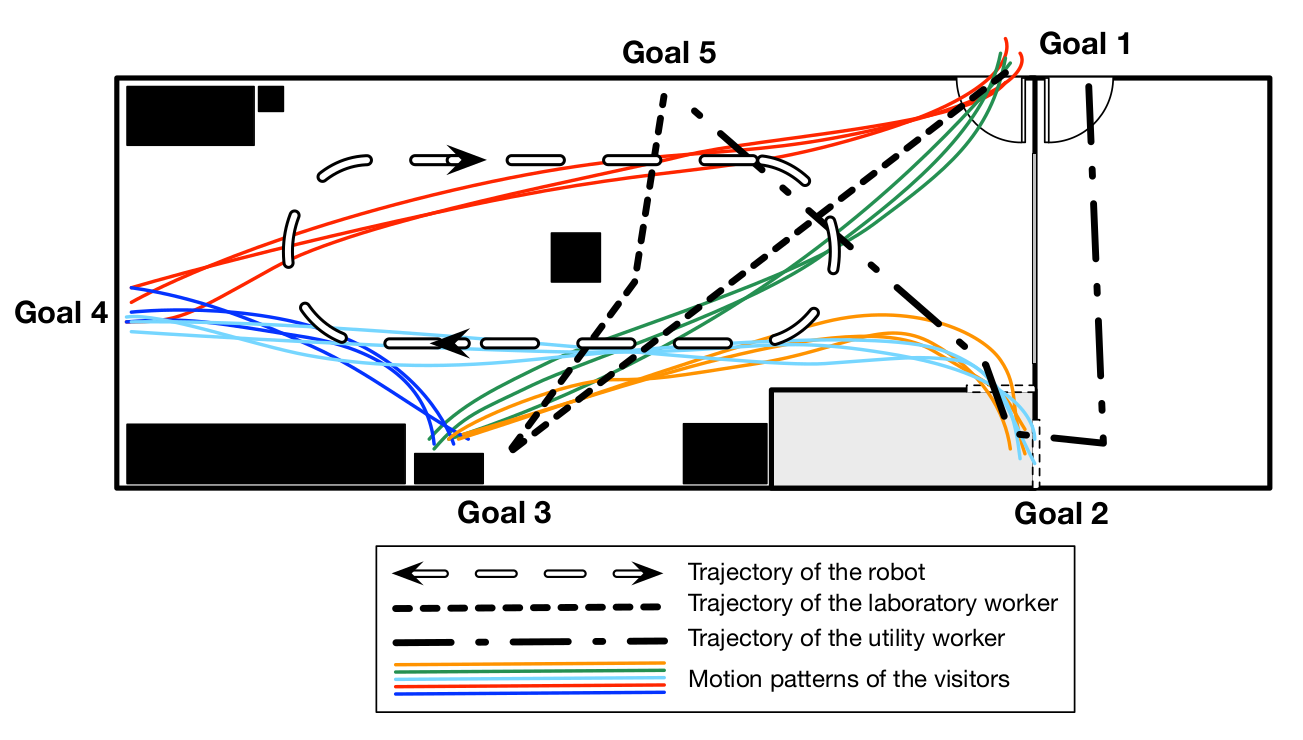
- High variety of human behavior and social interactions between individuals, groups of people and a mobile robot in presence of static obstacles
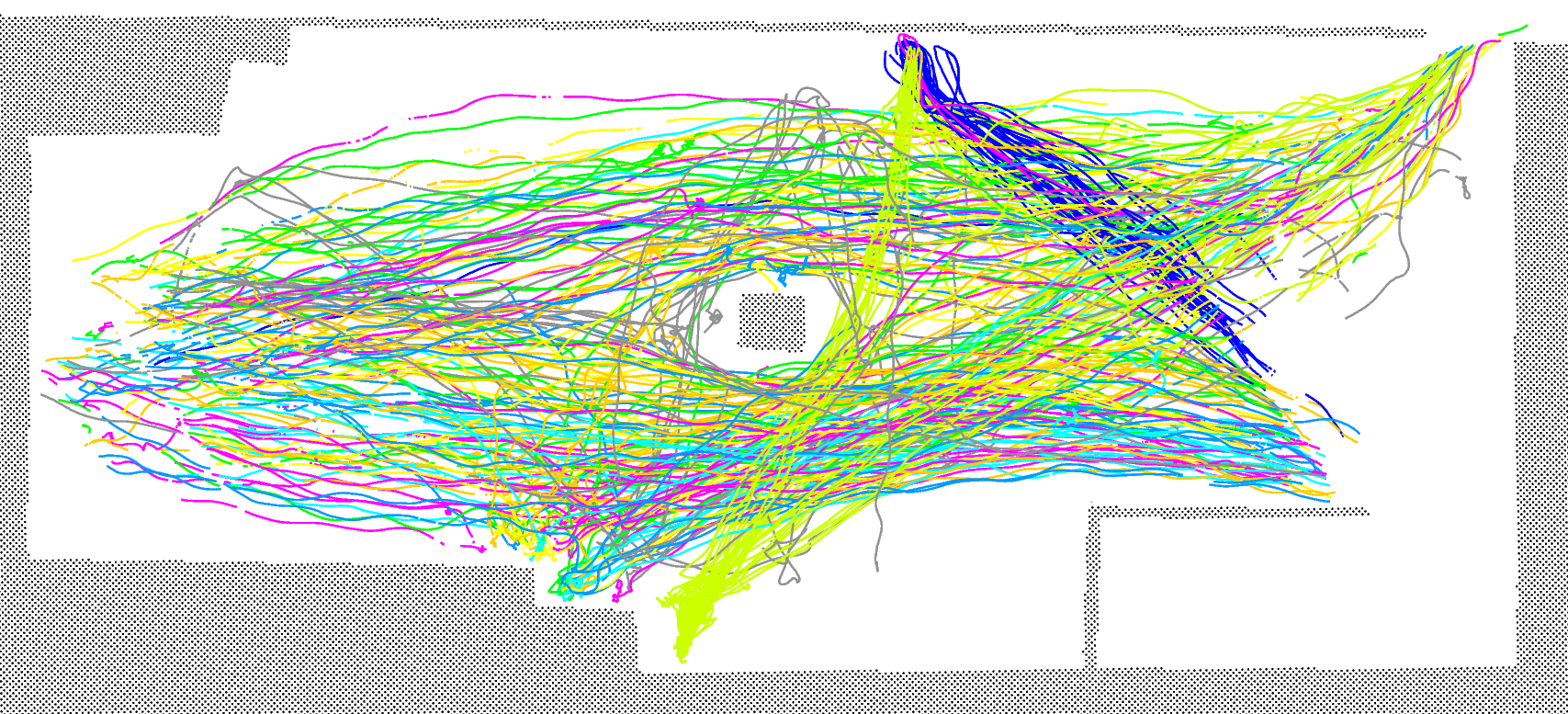
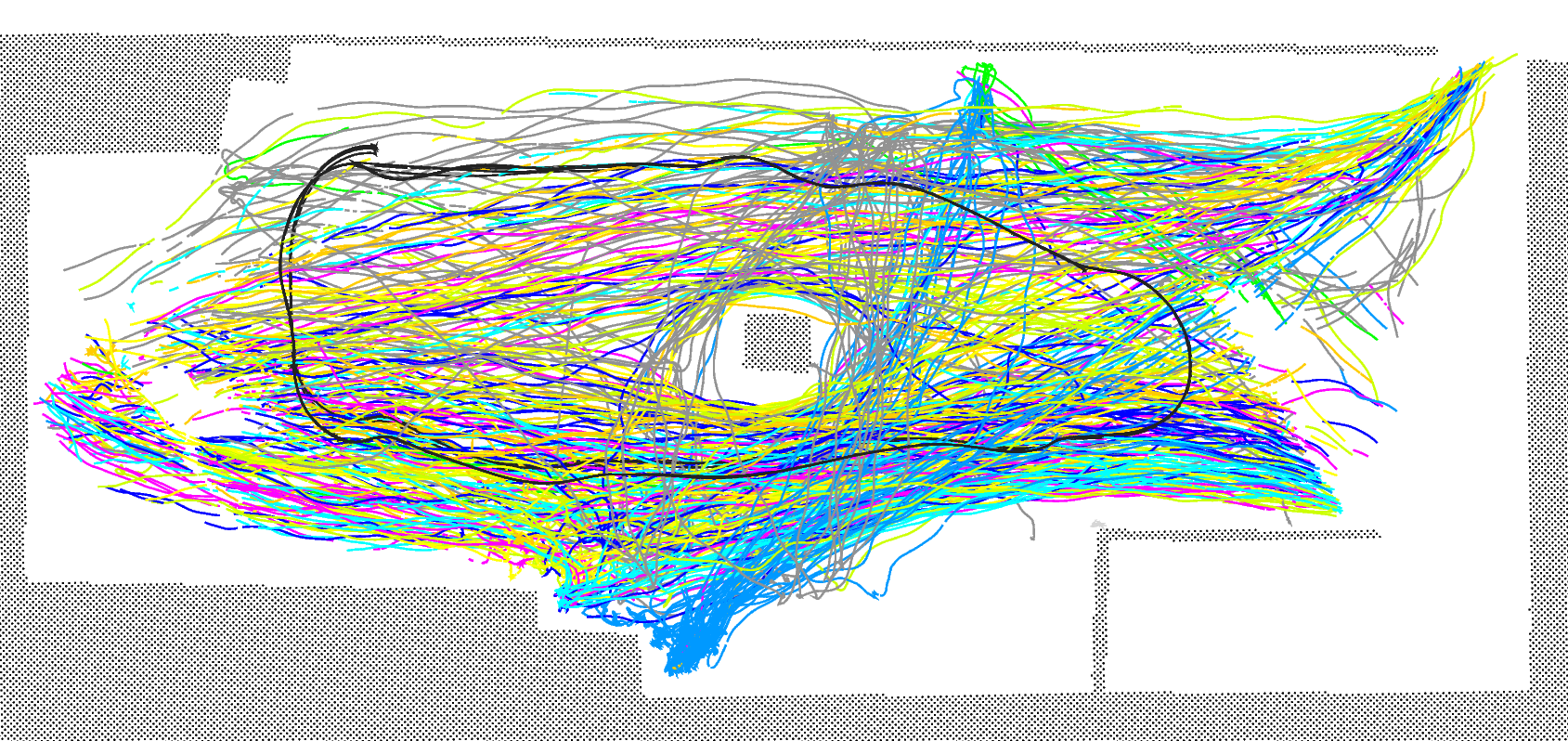
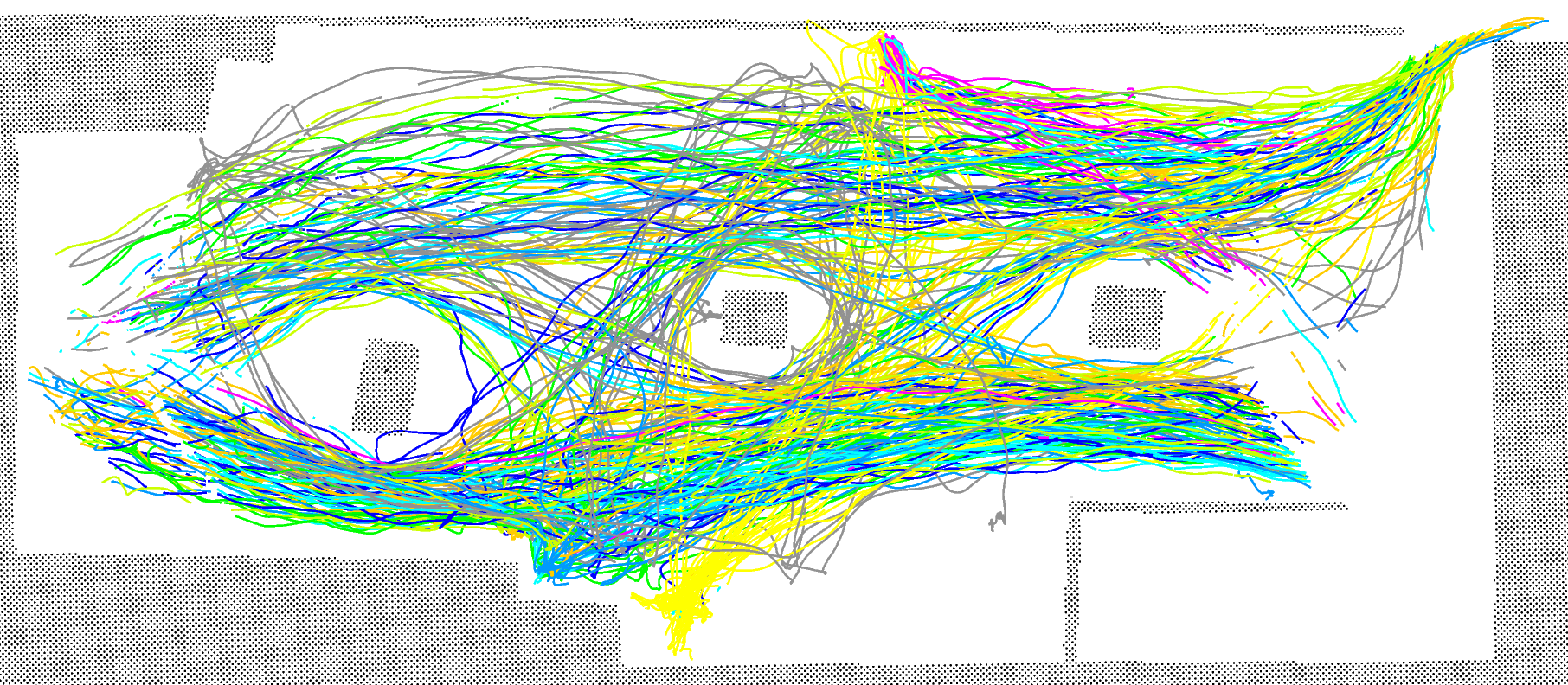
- Over 60 minutes of continuous motion tracking
- Over 600 individual and group trajectories between multiple goal points
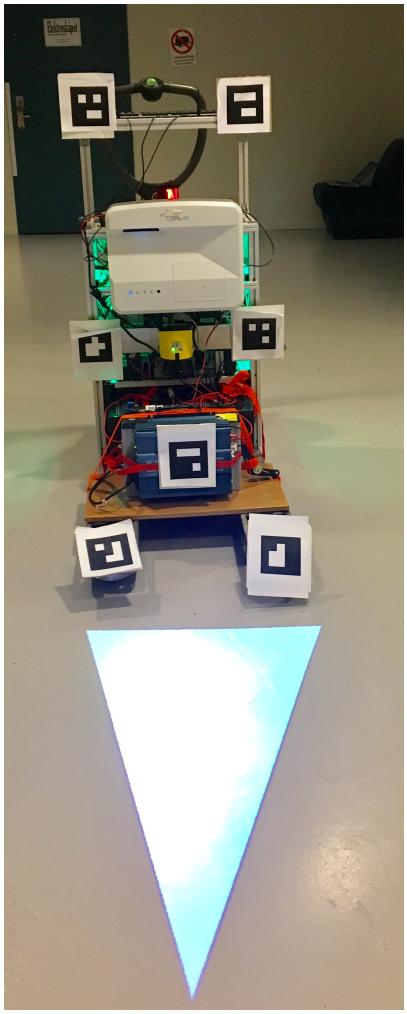
- Accurate data for position and 3D head orientation, recorded with a motion capture system at 100 Hz
- Eye gaze data at 50 Hz with the gaze-overlaid first-person video at 25 Hz
- 3D LiDAR scans from a stationary sensor
- Video recording from a static camera
- Map of static obstacles, goal coordinates, grouping information
- Several recordings with varying obstacles and motion of the robot
Updates
- 11.09.19 The THÖR dataset is published online